基于大连海事大学新红专实训两用船设计团队的顶尖技术,为传统船舶提供智能化改造升级,实现从人工驾驶到智能辅助驾驶的跨越。通过先进的传感器融合、智能算法和自主控制系统,将老船改造为具有自动驾驶能力的现代化智能船舶。
查看技术规格将传统船舶改造为智能辅助驾驶船舶的完整解决方案
船舶辅助驾驶系统是针对传统船舶智能化改造的全面解决方案。系统通过集成先进的传感器、智能控制算法和自主决策系统,为船舶提供从路径规划、避障航行到自动靠离泊的完整智能辅助驾驶功能。
基于大连海事大学在船舶设计、自动控制和海洋工程领域的深厚技术积累,我们的系统已在多型船舶上得到验证,特别是在新红专实训两用船上的成功应用,证明了系统的可靠性和先进性。

基于多传感器融合和智能算法的先进技术架构
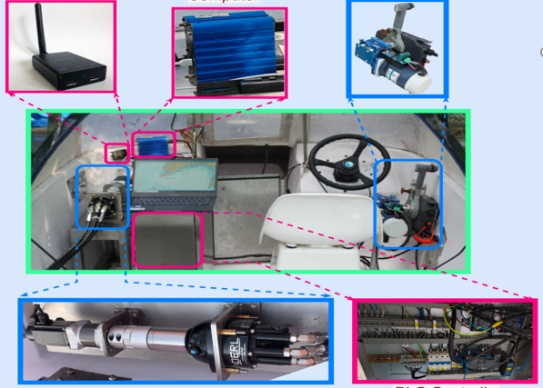
系统集成雷达、AIS、视觉摄像头、激光雷达、惯导、GPS/北斗等多种传感器,通过数据融合算法构建船舶周围360度环境模型,实现对目标船舶、障碍物、浮标和岸线的精确识别与跟踪。

基于深度学习和强化学习算法,系统能够理解COLREGs国际避碰规则,结合实时水文气象数据,做出符合人类驾驶员经验的智能决策。决策系统考虑安全性、经济性、舒适性等多目标优化。

采用模型预测控制(MPC)和自适应控制算法,实时计算最优舵角和主机转速指令,考虑船舶动力学特性、风浪流干扰等因素,实现精确的轨迹跟踪和运动控制,特别适用于自动靠离泊等精细操纵。
基于大连海事大学新红专实训两用船设计团队的顶尖技术

本系统的核心技术源自大连海事大学新红专实训两用船设计团队。该团队在船舶设计、自动控制、智能航海等领域拥有超过20年的研究积累,参与了多项国家级重大科研项目。
新红专实训两用船作为团队的代表性成果,集成了最先进的智能航行技术,在实际应用中验证了系统的可靠性和先进性。我们将这些成熟技术应用于传统船舶改造,为船东提供经济高效的智能化升级方案。
团队拥有多项核心专利和技术成果,在船舶自主控制、多传感器融合、智能避障等领域处于国内领先地位,为系统的持续创新和技术升级提供了坚实保障。
系统提供的全方位智能辅助驾驶功能
基于电子海图、实时水文气象数据和航行规则,自动生成最优航行路径,考虑燃油效率、航行时间和安全性等多重因素。
融合雷达、AIS、视觉和激光传感器数据,实时探测周围船舶、障碍物和浮标,自动规划避让路径,确保航行安全。
基于高精度定位和运动控制算法,实现船舶的自动靠泊和离泊操作,大幅降低操纵难度和人为失误风险。
实时分析船舶阻力、推进效率和主机工况,智能调节航速和舵角,实现最佳燃油经济性,可降低燃油消耗30-50%。
支持全自动、辅助驾驶和手动驾驶三种模式无缝切换,驾驶员可随时介入控制,系统提供决策建议和预警信息。
实时监测船舶状态和航行环境,对碰撞风险、偏离航线、设备故障等异常情况提前预警,并自动执行应急程序。
传统船舶与智能辅助驾驶船舶的显著差异
完全依赖驾驶员经验和技术
燃油消耗高,能效优化困难
夜间、雾天航行风险大
靠离泊操作难度大,需拖轮协助
事故风险主要来自人为失误
系统提供智能决策支持
燃油消耗降低30-50%
全天候安全航行保障
自动靠离泊,减少拖轮使用
事故率降低60-80%
详细的系统技术参数与性能指标
适用于各类船舶的智能化改造
为远洋货船和集装箱船提供智能辅助驾驶,降低船员工作强度,提高航行安全性,优化燃油消耗,实现经济效益最大化。
为危险品运输船舶提供高安全性辅助驾驶,特别强化自动避障和应急处理能力,保障特殊货物运输安全。
为客运船舶提供平稳舒适的自动航行体验,优化靠离泊操作,提高航班准点率,提升乘客满意度。
为海洋工程、渔业、科研等特种船舶提供高精度定位和自动控制,支持定点作业、航线跟踪等特殊任务。