BlueROV2系列是基于全球领先的开源水下机器人技术打造的高性能、可扩展水下作业平台。我们秉承开源精神,以极致的性价比为教育机构、科研单位和爱好者提供专业级的水下机器人解决方案。
基于开源技术的多功能、高扩展性专业水下机器人
重要声明: BlueROV2系列水下机器人的全部软硬件技术均基于Blue Robotics公司的开源项目,遵循MIT开源协议。我们在此开源技术基础上进行集成、优化和生产,以极致的价格为教育市场和爱好者提供服务。
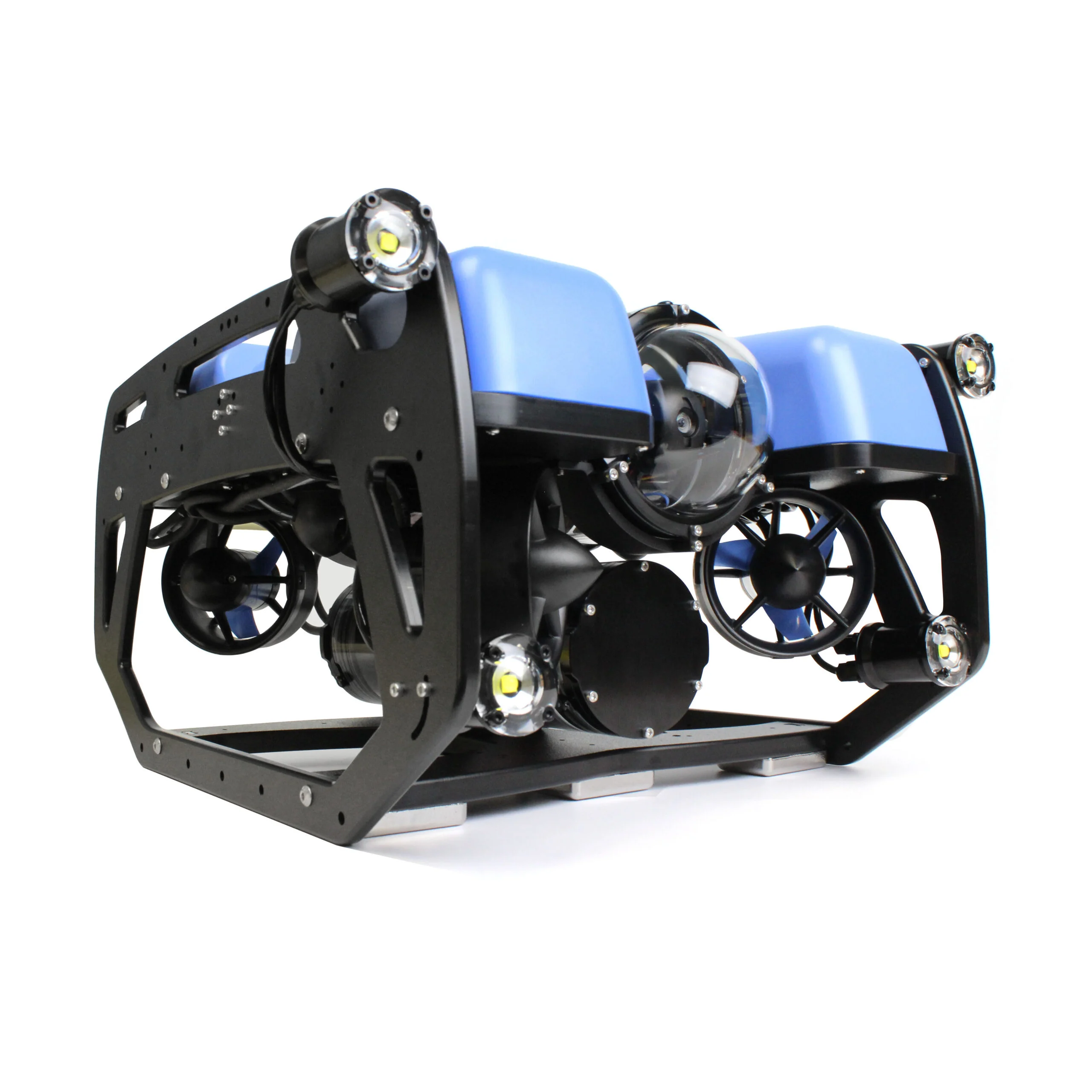
本系列机器人专为教育机构、科研单位和机器人爱好者设计,采用6-8台无刷直流推进器,提供强大的动力和精确的控制能力。配备1080P高清摄像机和可调LED灯,确保在各种水下环境中获得清晰的视觉图像。
价格说明: 由于我们完全基于开源技术,避免了昂贵的研发费用,并且专注于服务教育客户和爱好者市场,因此能够以远低于市场同类产品的价格(25,999元起)提供专业级的水下机器人解决方案。

选择适合您需求的BlueROV2型号
六推进器标准配置
八推进器专业配置
注:所有型号均基于开源技术,价格已包含基本配置。可根据需求定制工作深度、脐带缆长度等参数,价格可能相应调整。
观看BlueROV2水下机器人的实际操作与应用演示
更多演示视频和教程可在 开源社区GitHub页面 和 官方网站 找到
获取完整的开源文档、代码和社区资源
BlueROV2系列产品完全基于Blue Robotics公司的开源技术,遵循MIT开源协议。这意味着您可以:
基于开源技术的全方位水下作业与探测能力
硬件、固件和软件全部基于开源项目,遵循MIT协议。用户可以自由修改、分发和用于商业用途,享受完整的开源生态支持。
提供6推进器标准版和8推进器Heavy版。8推进器版本提供全六自由度控制和主动横摇纵摇稳定,适合专业应用场景。
专为教育市场和爱好者设计,提供详细的中文文档、教程和社区支持。价格远低于商业级产品,让更多人可以接触水下机器人技术。
配备1080P高清摄像机和3000-6000LUX可调LED灯,提供清晰的水下视觉图像,支持全方位观察和记录。
丰富的扩展接口,支持机械手、扫描声呐、CTD、DVL、USBL等多种传感器和设备,满足教学、科研和项目开发需求。
基于全球活跃的开源社区,拥有数千名开发者和用户。提供论坛、文档、教程和示例代码,学习曲线平缓,资源丰富。
技术说明: 以上技术规格基于Blue Robotics开源项目公开参数。由于开源技术的持续演进,部分参数可能随版本更新而变化。最新、最准确的技术参数请参考 GitHub开源仓库 和 官方文档。
BlueROV2开源水下机器人适用于多种教学、科研与项目开发场景
用于中学、大学的机器人、工程、海洋科学等课程教学,让学生亲手组装、编程和操作真实的水下机器人系统。
支持海洋科学、环境监测、机器人学等领域的研究项目,提供可定制、可扩展的低成本科研平台。
为算法开发、传感器集成、自主控制等研究提供验证平台,完全开源的特性便于深度修改和二次开发。
用于水库、湖泊、河流等水域的环境调查、基础设施检查、生物观测等民间科学和探索活动。
BlueROV2系列的开源特性使其成为教育和科研领域的理想选择。教师可以基于真实系统讲解机器人原理,学生可以查看每一行代码和每一个设计文件,研究人员可以自由修改系统以适应特定需求。这种透明度和可访问性是传统商业系统无法提供的。