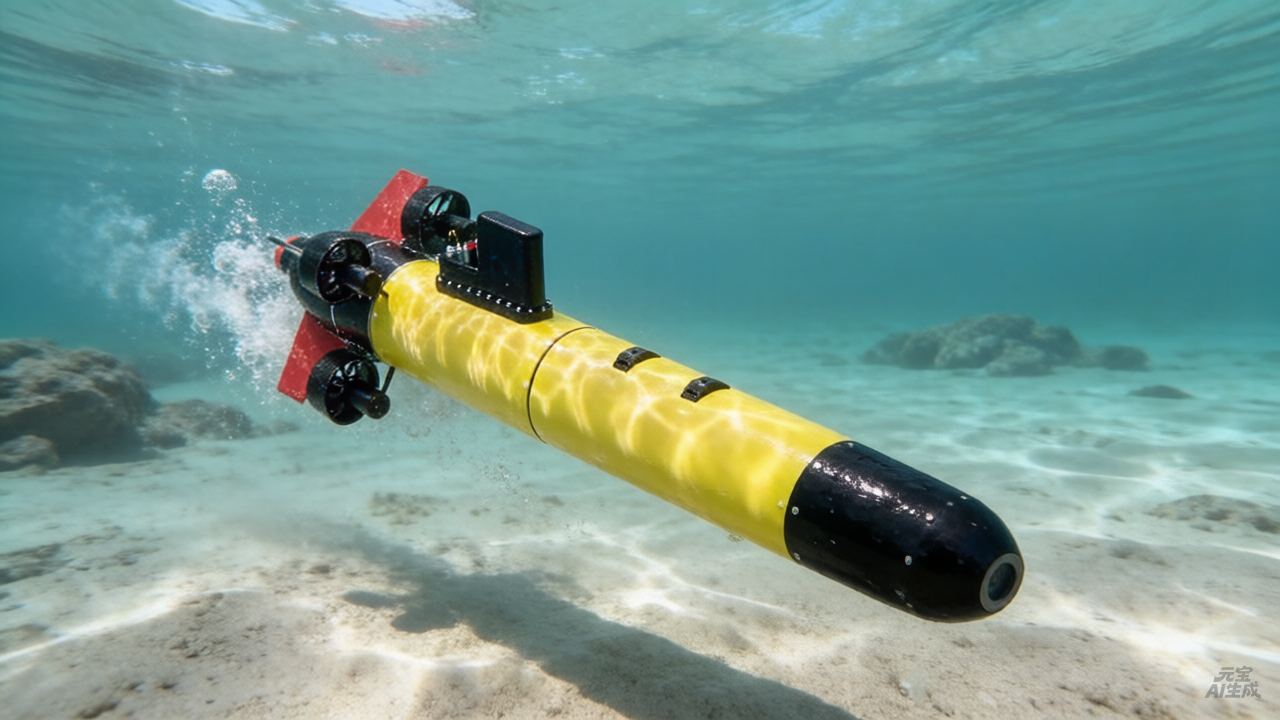
高瑞海工ARROW系列水下航行器提供130mm和160mm两种口径选择,专为不同水下探测与作业任务设计。具备高精度定位、自主航行和遥控操作能力,适用于海洋工程、环境监测、资源勘探等多种应用场景。
查看型号对比专为水下探测与作业设计的高性能航行器系列
ARROW系列水下航行器是高瑞海工针对水下探测与作业任务研发的专业设备。该系列提供130mm和160mm两种口径选择,满足不同应用场景的需求,从小型精密探测到中型作业任务均可胜任。
航行器采用先进的推进系统和姿态控制技术,具备进退、转艏、俯仰、滚转等自由度,支持自主航行和遥控操作两种工作模式。内置多种传感器,能够实时监测航行状态和环境参数。
根据您的任务需求选择合适的ARROW型号

ARROW130-小是一款紧凑型水下航行器,专为空间受限的水下探测任务设计。尺寸小巧,机动性强,适用于管道检测、狭窄空间作业和精细探测任务。
该型号配备高性能深度相机,支持高清图像采集和实时视频传输,能够在复杂水下环境中精确执行探测任务。支持多种附件扩展,可根据任务需求灵活配置。

ARROW160-大是一款多功能水下航行器,专为中大型水下作业任务设计。具有更强的载荷能力和更长的续航时间,适用于海洋工程、资源勘探和科学研究等应用。
该型号配备先进的姿态控制系统和多种传感器,支持长时间自主航行和精确作业。可根据任务需求搭载多种专业设备,满足复杂水下作业需求。
ARROW130-小与ARROW160-大详细技术参数对比
| 技术参数 | ARROW130-小 | ARROW160-大 |
|---|---|---|
| 机械参数 | ||
| 尺寸(长×宽×高/直径) | 745mm×205mm×165mm | 艇长1450mm,艇高348mm,艇身直径160mm |
| 重量 | 76.5kg | 无任务载荷下20kg |
| 工作深度 | ≥100m(可根据用户需求定制) | |
| 最大前进速度 | 7.2m/s | ≥4节(静水条件下) |
| 最小回转半径 | 7.15m | - |
| 推进与控制 | ||
| 推进方式 | - | 双水平推进器,具备差速转弯功能 |
| 姿态控制 | - | 具备进退、转艏、俯仰、滚转自由度 |
| 载荷能力 | - | 最大载荷质量5kg |
| 电气参数 | ||
| 工作电压 | 24V | - |
| 电池容量 | 384W·h | - |
| 续航力 | - | 连续作业时间不低于8h |
| 充电时间 | 5h | - |
| 深度相机 | ||
| 深度FOV | 87°×58° | - |
| 深度分辨率 | 1280×720 | - |
| 深度帧速度 | 90fps | - |
| 通讯参数 | ||
| 有线通讯距离(调参使用) | 15m | - |
| 无线通讯距离(调参使用) | 5m | - |
| 控制功能 | ||
| 航行控制 | - | 具备航向角、深度保持能力及防触底能力 |
| 控制软件 | - | 自主航行+遥控航行两种工作模式 |
| 自主航行功能 | - | 按航向角、深度、位置点等数据自主航行 |
| 信息传输功能 | - | 航行数据、工况数据记录,有线连接后读取 |
| 传感器 | ||
| 内置传感器 | - | 9轴姿态传感器、深度计、电子罗盘、温度传感器 |
ARROW系列水下航行器提供的全方位探测与作业能力
采用先进的控制算法,实现精确的航向角、深度保持和防触底功能,确保在复杂水下环境中稳定作业。
支持自主航行和遥控操作两种工作模式,可根据任务需求灵活切换,提高作业效率和安全性。
配备高性能深度相机,支持高清图像采集和实时视频传输,为水下探测提供清晰的视觉信息。
集成9轴姿态传感器、深度计、电子罗盘等多种传感器,实时监测航行状态和环境参数。
优化电源管理系统,提供5-8小时连续作业时间,满足长时间水下探测任务需求。
支持多种附件扩展,包括USBL水声通讯模块、水质传感器等,可根据任务需求灵活配置。
扩展ARROW系列水下航行器功能的各种专业附件
提供水下精确定位和远程通讯能力,扩展航行器的作业范围和通信距离。
实时监测水质参数,包括温度、盐度、浊度、pH值等,适用于环境监测任务。
提供高分辨率海底地形测绘能力,适用于海底地形调查和障碍物探测。
提供充足的水下照明,确保在深水或浑浊水域中仍能获得清晰的视觉图像。
ARROW系列水下航行器适用于多种水下探测与作业任务
用于海底管道、电缆的定期检测与维护,及时发现损伤和潜在风险。
进行水质监测、生态调查和污染源追踪,支持海洋环境保护工作。
对船舶水下部分进行检查,评估腐蚀状况和生物附着情况。
支持海洋地质、生物、化学等多学科科学研究,采集水下样品和数据。