运行与维护建议
保障系统长期稳定运行的最佳实践
传感器清洁
由于视距传感器会受到海水及矿粉的影响,经常导致镜头脏污,影响测量精度。建议一周对传感器镜头进行一次清洁。
系统维护
展示端系统采用Unity3D进行数字孪生展示,建议一周对服务器进行一次重启以保证服务器的运行状态不卡顿。
定期检查
由于码头附近偶尔会有渔船靠近至码头墩台处,建议定期观察码头前端设备是否有松动及变形情况并及时反馈,确保设备安全。
针对泊位旋回水域较小的码头,本系统通过工业视觉监测技术实时监测船舶六自由度运动姿态,防止恶劣气象、海况导致船舶剧烈摇荡,保障船舶作业安全、稳定和效率。
查看技术规格针对港口码头特殊环境设计的智能监测系统,保障大型船舶在泊安全
遇到泊位旋回水域较小,经常受外海涌浪和本地气旋的影响。恶劣气象、海况会导致船舶产生剧烈摇荡运动,严重影响船舶作业的安全性、稳定性和作业效率,甚至引发严重安全事故。
本系统通过建设"大型油轮在泊状态监测系统"实现船舶在系泊状态下的运动姿态智能实时监测,采用工业视觉监测技术和先进信息化智能算法,对船舶运动六自由度进行实时监测,系统搭载视距传感器,提高雾天、夜间测量的准确性。

系统提供的全方位监测与管理功能
对靠离泊过程的船舶速度、加速度、船舶与码头距离等数据实时获取;在泊状态下船舶六自由度运动姿态实时监测。
根据设定的位移、角度阈值参数,当船体运动姿态超出参数值后进行实时报警,为船舶系缆安全调整、安全系泊提供数据支撑。
支持历史数据查询、趋势分析、数据统计和导出功能,可按1秒、10秒、30秒、1分钟、5分钟、10分钟等间隔查看数据。
提供船舶六自由度数据趋势变化图和统计展示,包括折线图和饼状图,直观展示船舶运动状态变化趋势。
采用视距传感器,保证夜间及雾天的数据准确性,实现24小时不间断监测。
支持PC端和APP端访问,引航、海事、码头三方人员均可通过终端实时查看船舶运动状态。
直观、易用的用户操作界面

进入登录页面后,输入账号密码,点击登录按钮进入系统。
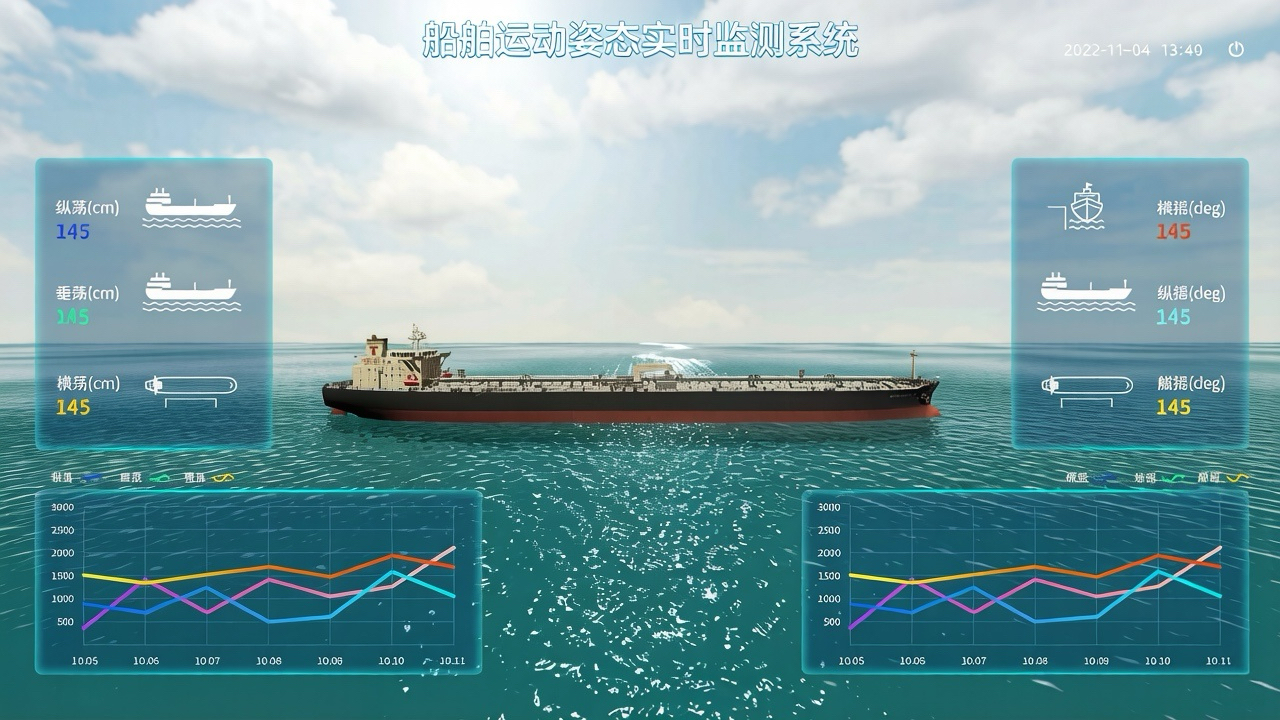
展示船舶六自由度数据的单位时间变化值、一分钟内的趋势变化图、码头船舶停靠状态、系统报警信息提示和查询功能。
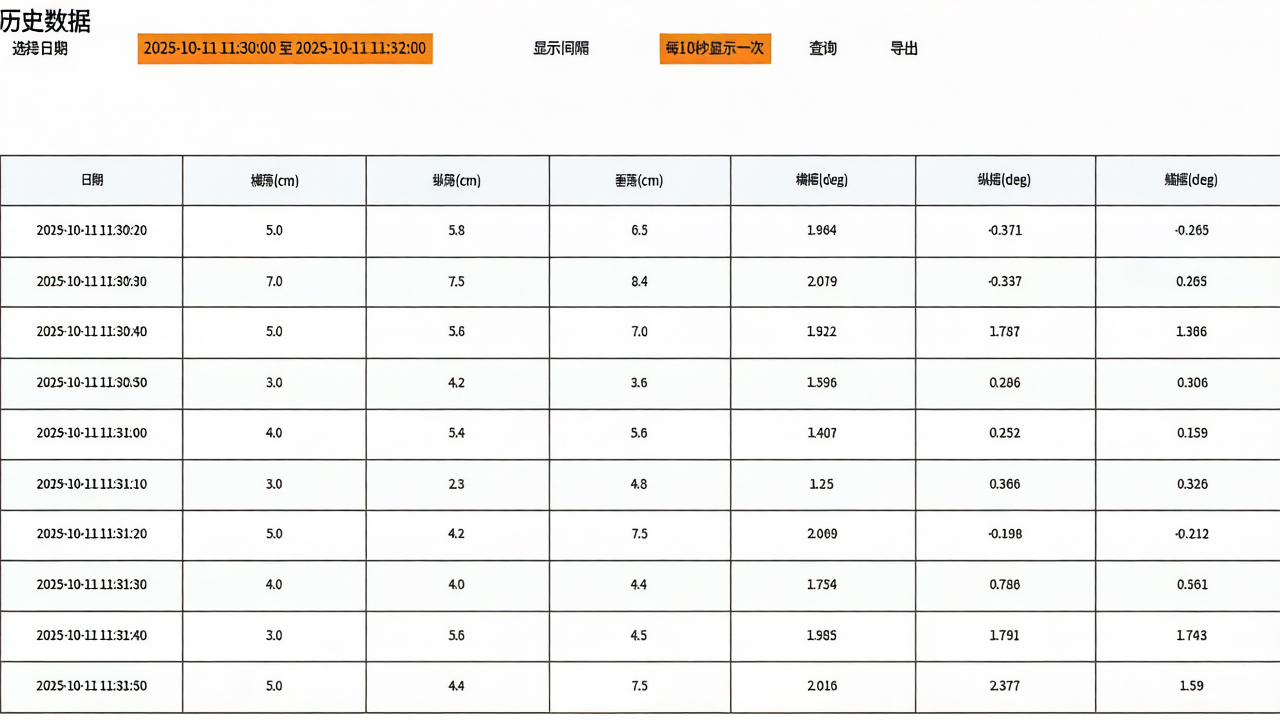
可对近三个月船舶六个自由度数据进行查询,支持按1秒、10秒、30秒、1分钟、5分钟、10分钟等间隔显示,支持数据导出。
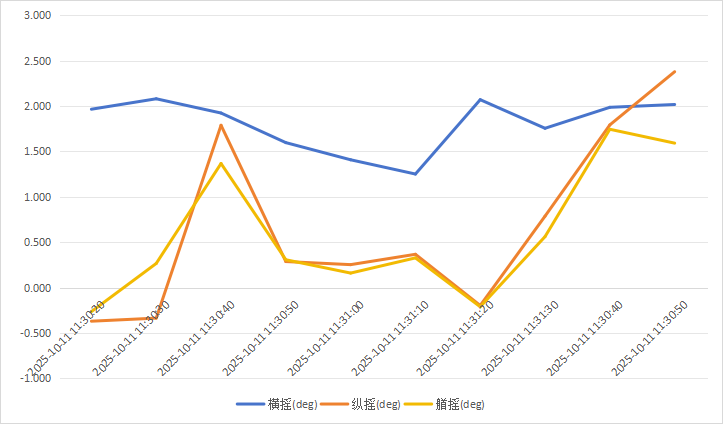
提供折线图展示船舶六自由度数据趋势变化,饼状图展示数据统计分布,帮助用户直观了解船舶运动状态。
自主研发的核心技术获得多项软件著作权
融合视觉与激光雷达的船舶六自由度运动智能分析系统 V1.0
船舶夜航雾航雷达-光学图像智能融合算法V1.0
基于工业视觉双目测距的先进监测技术

系统基于工业视觉双目测距的基本原理,模拟人类视觉原理,使用计算机被动感知距离的方法。从两个或者多个点观察一个物体,获取在不同视角下的图像,根据图像之间像素的匹配关系,通过三角测量原理计算出像素之间的偏移来获取物体的三维信息。
系统采用自主研发的核心算法,配合视距传感器,支持分米到百米级的测量距离,距离10m时精度可达1毫米。智能识别船体,船系泊状态时自动进行特征点提取并开始分析。
船舶在系泊作业过程中的六种基本运动形式
详细的系统技术参数与性能指标
保障系统长期稳定运行的最佳实践
由于视距传感器会受到海水及矿粉的影响,经常导致镜头脏污,影响测量精度。建议一周对传感器镜头进行一次清洁。
展示端系统采用Unity3D进行数字孪生展示,建议一周对服务器进行一次重启以保证服务器的运行状态不卡顿。
由于码头附近偶尔会有渔船靠近至码头墩台处,建议定期观察码头前端设备是否有松动及变形情况并及时反馈,确保设备安全。
系统适用于多种港口码头场景
特别适用于油品公司泊位等旋回水域较小的油品码头,保障大型油轮在泊安全。
适用于集装箱码头前沿,实时监测靠离泊及在泊状态下船舶运动姿态,提高作业效率。
用于散货码头,防止恶劣气象、海况导致船舶剧烈摇荡,保障装卸作业安全。
支持引航、海事、码头三方通过PC端和APP端实时查看船舶运动状态,实现协同作业。