高瑞海工CRUISER系列水下机器人提供6推进器和8推进器两种配置选择,专为不同水下作业任务设计。具备极高的运动操控性、300米工作深度和多种扩展接口,适用于海洋工程、环境监测、资源勘探等多种应用场景。
查看型号对比专为水下作业与探测设计的高性能机器人系列
CRUISER系列水下机器人是高瑞海工针对水下作业与探测任务研发的专业设备。该系列提供6推进器和8推进器两种配置选择,满足不同作业场景的需求,从小型检测任务到中型作业任务均可胜任。
机器人采用无刷直流浸没式推进器,配备矢量配置,具有极高的运动操控性。浮力可调节,预留多种扩展接口,可搭载多种设备,例如声纳、机械臂、采样工具及其他定制工装。适合绝大多数水下作业工作。

根据您的任务需求选择合适的CRUISER型号

CRUISER 6 专为复杂深水环境打造,配备6个大功率推进器,采用水下免维护全密封深水充油推进器,自适应油压补偿技术,单个推力≥15.2kg,轻松应对急流、深水等恶劣作业条件。
搭载800万像素4K超高清摄像机,配备铝合金水密壳与光学石英玻璃,2.8mm定焦镜头自带水下透雾及绿光抑制功能,无惧浑浊水域;深水大扭矩云台舵机采用316L不锈钢材质,额定扭矩2N·m,保障设备在高压水深下稳定运行。4路5000流明主补光 + 2路1500流明随动补光,即使在黑暗深海中也能获得清晰明亮的影像。

CRUISER 8 以出色的姿态控制与精细作业能力见长,整机仅约25kg,单人即可携带下水。配备≥8组全矢量深水充油推进器,单个推进器最大推力≥8kg,可实现精确三维运动控制,特别适合水下设施检测、精细搜救等需要高度灵活性的任务。
200W像素1080P网络高清摄像机内置图像增强算法与水下自动透雾功能,俯仰云台覆盖向上30°至向下60°视野范围,配合2个3000流明高亮补光灯,足以应对复杂水下光照环境。100米标准作业深度(可订制加深),是近岸工程与精细检测的理想选择。
cruiser 6与cruiser 8详细技术参数对比
| 技术参数 | cruiser 6 | cruiser 8 |
|---|---|---|
| ROV本体参数 | ● CRUISER 6 · 强劲深水作业专家 | ● CRUISER 8 · 精细操作姿态大师 |
| 作业水深 | ≥300m(可按需定制) | ≥300m(可按需定制) |
| 尺寸(长×宽×高) | ≤800 × 550 × 360 mm | 485 × 624 × 326 mm |
| 重量 | ≤42 kg | 约 25 kg(本体重量,便携,单人可操作) |
| 摄像机 | 有效像素≥800万,4K分辨率(3840×2160),铝合金水密壳,光学石英玻璃,云台俯仰±45°可调,图像增强算法、强光抑制、绿光抑制功能 | 有效像素≥200万,分辨率1080P,铝合金水密壳,云台俯仰±90°可调,图像增强算法、强光抑制、绿光抑制功能 |
| 摄像云台 | 深水大扭矩舵机云台,316L材质,额定输出扭矩2N·m,云台俯仰±45°可调 | 俯仰云台,向上/下±90°可调 |
| 推进器 | 6个推进器,水下免维护全密封深水充油推进器,自适应油压补偿,单个推力≥15.2kg,推进器最大功率600W,48V供电 | ≥8个全矢量深水充油推进器,自适应油压补偿,单个推进器最大推力≥8kg,全矢量布局 |
| 前进推力 | 静水中航速3节(1.5m/s),前进推力约39.8kg | 静水中航速3节(1.5m/s),前推力13kg |
| 传感器 | 9轴姿态传感器、压力传感器、温/湿度传感器、漏水监测、深度传感器、DVL多普勒测速仪 | 9轴姿态传感器、压力传感器、温/湿度传感器、漏水监测、深度传感器、DVL多普勒测速仪 |
| 自动功能 | 定深悬停、定向航行、自动抗流功能(无需人工干预)、自主巡航功能(对底高度≤45m) | 定深悬停、定向航行 |
| 补光灯 | 4个水下高亮LED补光灯,单台5000流明,色温6000K;2个1500流明云台随动式补光灯,摄像云台随动式灯光 | 2个水下高亮LED补光灯,单台5000流明,色温6000K |
| 框架材质 | 高耐压复合材料、耐腐蚀复合材料 | 高耐压复合材料、耐腐蚀复合材料 |
| 扩展性 | 可搭载机械手、多波束声呐、水声定位、USBL、GPS定位、水质传感器等设备 | 可搭载机械手、多波束声呐、水声定位、USBL、GPS定位、水质传感器等设备 |
| 供电 | 岸基直流供电,无限续航 | 岸基直流供电,无限续航 |
| 线缆系统 | ||
| 线缆长度 | 标配≥300m(可定制更长) | 标配≥100m(可按需定制) |
| 线缆规格 | 水下专用零浮力复合线缆,聚氨酯发泡护套,内含凯夫拉纤维,破断力≥500kg | 水下专用零浮力复合线缆,聚氨酯发泡护套,内含凯夫拉纤维,破断力≥100kg |
| 收线器尺寸 | 578 × 450 × 520 mm | 423 × 310 × 340 mm |
| 收线器重量 | 50 kg | 15 kg |
| 甲板单元 | ||
| 甲板单元材质 | PP材质防水箱 | PP材质防水箱 |
| 显示器 | 17.3英寸高亮液晶三联屏,可同时显示日期、航向、姿态、俯仰角、温度、深度、灯光亮度、云台角度、动力等级、运行时间、控制模式等信息;可一键开启/关闭录像 | 19英寸高亮液晶显示屏,可同时显示日期、航向、姿态、俯仰角、温度、深度、灯光亮度、云台角度、动力等级、运行时间、控制模式等信息;可一键开启/关闭录像 |
| 控制主机 | I5 CPU,16GB内存,1T固态硬盘,Windows 10系统 | I5 CPU,16GB内存,1T固态硬盘,Windows 10系统 |
| 面板接口 | 供电接口1个,USB接口2个,主线缆接口含保护地线;纯电池使用时长≥7h,充电电压24V,支持边充边用 | 供电接口1个、主线缆(ROV)接口1个、预留RJ45对外输出接口1个、USB接口1个 |
| 面板指示 | 系统电压、电流实时显示 | 系统电压、电流实时显示 |
| 操作键盘 | 全金属防水键盘,集成鼠标 | 全金属防水键盘,集成鼠标 |
| 安全性 | 带有空气开关和漏电保护器、接地端子,野外作业时与发电机可靠接地;不采用交流高压直接供电,无高压危险 | 带有空气开关和漏电保护器、接地端子,野外作业时与发电机可靠接地;不采用交流高压直接供电,无高压危险 |
| 操控方式 | 工业级无线手柄控制,支持无线连接;与收放线器通过Wi-Fi或有线连接 | 工业级无线手柄控制,支持无线连接;与收放线器通过Wi-Fi或有线连接 |
| 甲板单元尺寸 | 561 × 455 × 265 mm | ≤565 × 460 × 265 mm |
| 甲板单元重量 | ≤24 kg(三联屏) | ≤21.5 kg |
| 甲板单元供电 | 220V AC±10%供电,功率≤2.2kW,有独立ROV供电开关;可对外输出24V/400W用于地面站充电 | 220V AC±10%供电,功率≤2.2kW,有独立ROV供电开关;可对外输出24V/400W用于地面站充电 |
| 包装 | ||
| 包装配置 | 专业航空箱包装 | 专业航空箱包装 |
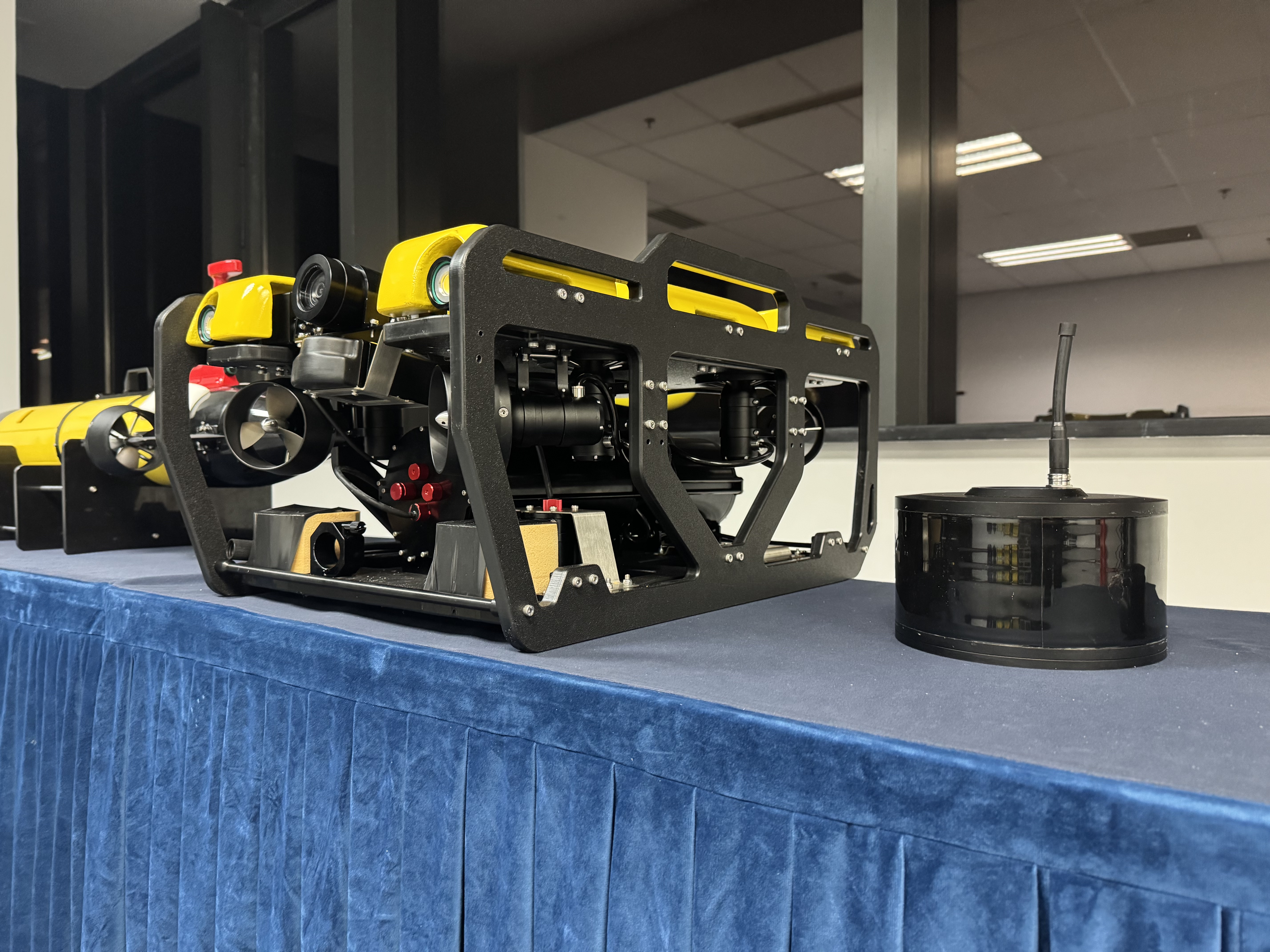
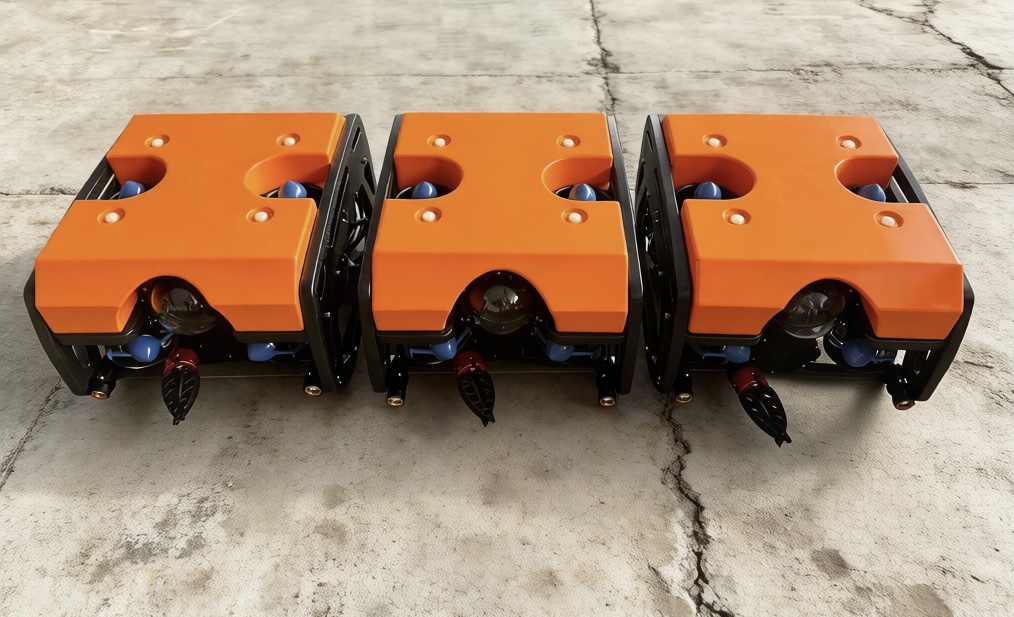
CRUISER 系列水下机器人各角度细节与实拍场景







观看CRUISER系列水下机器人的实际操作与应用演示
CRUISER系列水下机器人提供的全方位作业与探测能力
6/8推进器矢量配置,提供极高的运动操控性,实现进退、转艏、俯仰、滚转等多自由度精确控制。
配备1080p、0.01lux低照度高分辨率数字摄像头,具有俯仰云台功能,提供清晰的水下视觉图像。
两个1500流明超亮LED灯,提供充足的水下照明,确保在深水或浑浊水域中仍能获得清晰的视觉图像。
集成陀螺仪、加速度计、罗盘、深度传感器等多种传感器,实时监测机器人状态和环境参数。
预留多种扩展接口,可搭载声纳、机械臂、采样工具及其他定制工装,满足多样化作业需求。
300米工作深度,适应多种水下环境,满足海洋工程、资源勘探、科学研究等深水作业需求。
扩展CRUISER系列水下机器人功能的各种专业附件
提供水下探测和成像能力,包括侧扫声纳、前视声纳、成像声纳等,扩展水下探测范围。
提供水下精确定位能力,实现高精度水下导航和位置标记,提高作业精度。
提供水下抓取、采样、操作能力,扩展机器人的作业功能,满足复杂作业任务需求。
提供专业的控制界面和显示系统,支持多路视频显示和数据监控,提高作业效率。
CRUISER系列水下机器人适用于多种水下作业与探测任务
用于海底管道、电缆的定期检测与维护,及时发现损伤和潜在风险。
对船舶水下部分进行检查,评估腐蚀状况和生物附着情况。
支持海洋地质、生物、化学等多学科科学研究,采集水下样品和数据。
支持水下结构安装、维护、拆除等工程作业,提高作业安全性和效率。