基于北斗定位、激光扫描、三维点云处理与工业数字孪生技术,实现抓斗卸船机的远程操控、半自动及全自动无人化作业。系统具备舱口智能识别、料型实时更新、抓斗位姿感知等核心能力,大幅提升港口散货装卸效率与安全性。
了解产品详情融合北斗定位、激光扫描与AI算法的港口智能化装卸系统
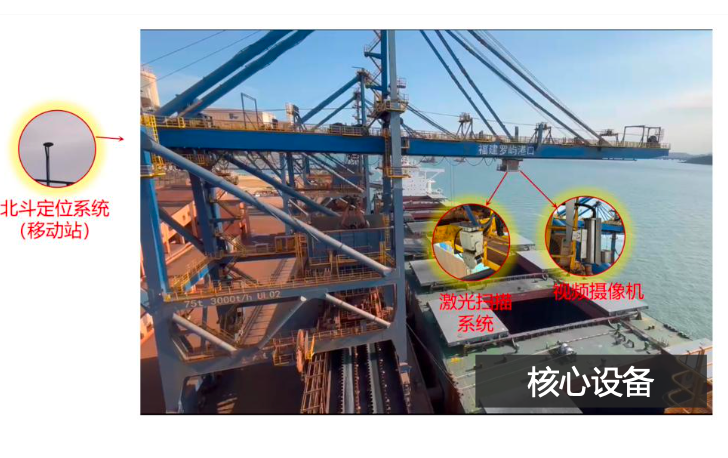
智能化抓斗卸船机系统由大连高瑞海工科技有限公司自主研发,采用模块化设计,整合北斗定位系统、激光扫描系统、视频摄像机、数据采集箱与三维可视化客户端,实现对抓斗卸船机的远程操控、半自动及全自动无人化作业。
系统具备舱口智能识别、料型实时更新、抓斗位姿感知、清仓机协同作业等核心能力,广泛应用于散杂货港口、冶炼行业与电力行业的散杂料仓储场景,已在营口五矿、华能曹妃甸、福建闽光、大连港等多家企业成功落地。
机上设备与机下设备通过光纤直连,实现高效稳定的数据通讯
安装在抓斗卸船机本体上的核心感知与定位设备
ET2箱与交换机安装在港机电气室内,北斗天线安装在电气室外房顶,扫描仪与摄像机安装于司机室外护栏
安装在控制室内的数据处理与可视化设备
港机与地面通过光纤连接两台交换机,实现高速稳定的数据传输
六大智能化功能模块,全面提升港口装卸作业效率与安全性
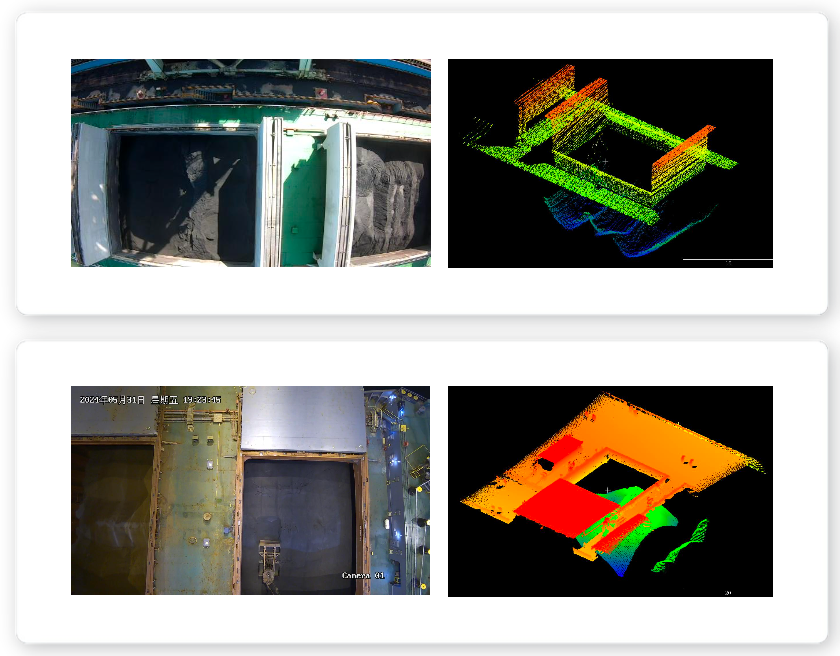
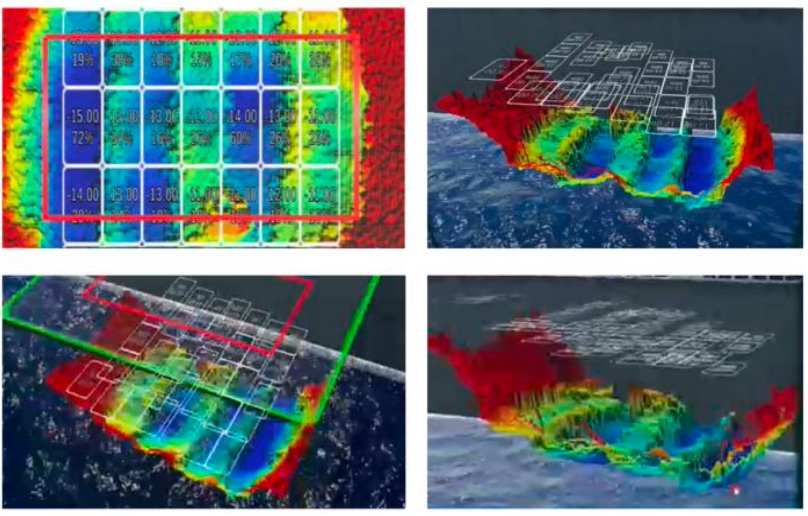
系统可扫描识别任意长宽的舱口,具备多种散货船舱口形态识别能力。自动识别舱口大小、倾角及四个角点位置坐标,并在三维软件中立体呈现舱口大小和位姿。
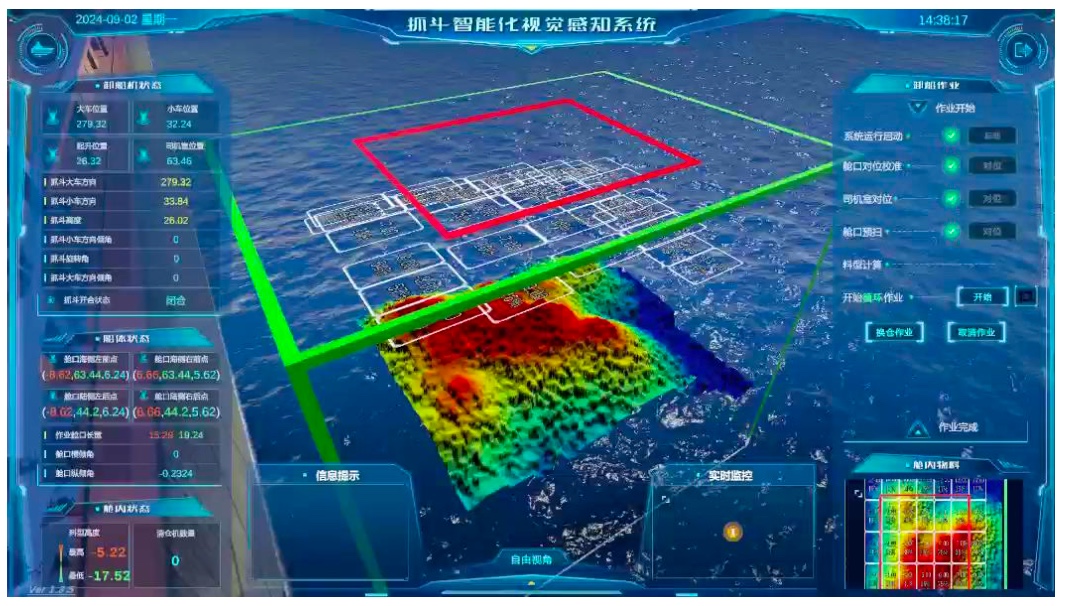
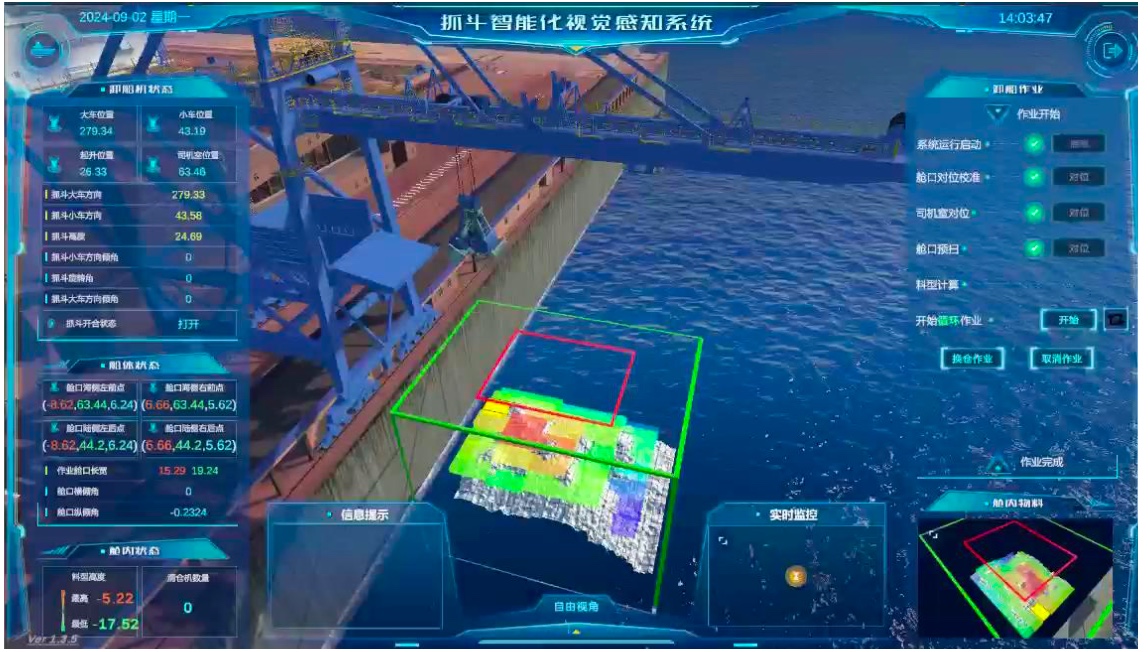
采用"一抓一扫一更新"策略,对每次抓取后的料型实时更新。以舱口边缘为基准向四周延伸计算料格范围,支持海陆两侧和左右边缘的抓斗掏舱作业。
识别抓斗在作业过程中与PLC基准位置之间的偏移和夹角。三维画面中PLC基准位置以实体模型显示,识别抓斗实际偏移以虚影模式显示,更新频率达200-300毫秒。
提供三维数字孪生可视化软件界面,用户可直观观测各角度设备状态及舱内料型状态。全方位把控抓斗卸船机生产作业过程,更安全、更高效。

清仓阶段利用视频摄像机实时识别抓斗周边清仓机,基于视频图像与激光三维点云的空间标定和转换关系,将视频识别坐标转换为空间坐标,供PLC与清仓机协同作业。
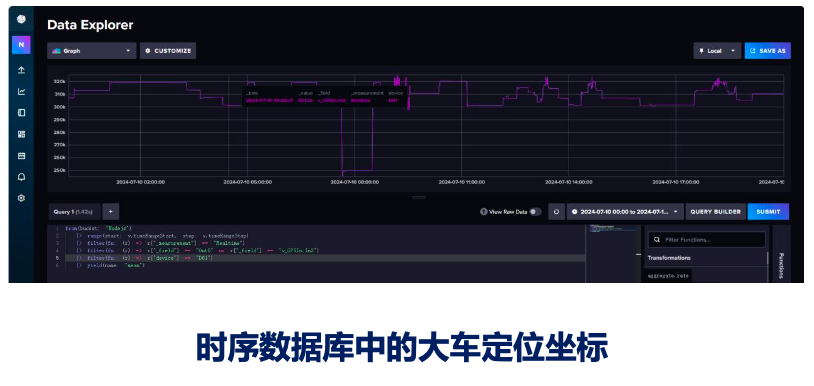
配有时序数据库,对全流程设备状态数据和识别数据进行存储。支持任意时段历史回顾与工况再现,为设备运维和作业优化提供数据支撑。
观看智能化抓斗卸船机的实际操作与三维可视化演示
智能化抓斗卸船机系统已在多家知名企业成功落地应用

为宝钢湛江钢铁原料码头部署智能化抓斗卸船机系统,实现矿石、煤炭等散料的高效智能装卸,助力大型钢铁企业原料供应链智能化升级。

在罗屿港部署智能化抓斗卸船机集群解决方案,实现多机协同作业与中央调度,大幅提升港口散货吞吐能力与作业智能化水平。
从舱口识别到清仓协同的完整智能化作业流程
激光扫描仪对舱口进行预扫描,识别舱口大小、倾角及四个角点坐标,建立三维空间基准。
以舱口边缘为基准计算料格范围,建立舱内物料三维料型模型,为抓斗路径规划提供数据基础。
系统根据料型自动规划最优抓取路径,司机可选择远程操控、半自动或全自动模式进行作业。
每完成一次抓取,系统立即扫描更新料型,结合大机走行位置与舱口预扫结果进行融合计算。
清仓阶段自动识别清仓机位置,实现抓斗与清仓机的协同作业,完成整船清仓。
系统核心性能指标与技术参数
智能化抓斗卸船机系统的核心竞争优势
融合激光扫描、视频识别与三维点云处理技术,实现舱口、料型、抓斗位姿的智能感知与识别,响应周期小于200毫秒。
支持远程操控、半自动及全自动三种作业模式,一屏多机控制,大幅减少作业司机人数,降低人力成本。
"一抓一扫一更新"策略实现料型实时更新,智能路径规划优化抓取顺序,显著提升散货装卸作业效率。
三维数字孪生可视化全方位把控作业过程,清仓机协同作业避免碰撞风险,时序数据库支持历史工况回溯分析。
智能化抓斗卸船机系统适用于多种散货装卸场景
适用于煤炭、矿石、粮食等散杂货港口的大型卸船作业,提升装卸效率与安全性。
用于钢铁、有色等冶炼企业的原料码头,实现矿石、焦炭等散料的智能化装卸。
适用于火电厂煤炭码头的卸船作业,保障电厂燃料供应的高效稳定。
用于大型散料仓储物流中心的装卸作业,实现散料的智能化转运与存储。